Da ormai tre decadi la gait analysis si è affermata come l’unica metodica di analisi del movimento largamente utilizzata in clinica. Il perché del cammino come strumento di indagine è dovuto principalmente a due fattori: in primis tale funzione è quella che meglio identifica l’autonomia del paziente nel contesto di vita quotidiano e come secondo ma non meno importante motivo la deambulazione è un attività con ripetitività funzionale ben definita, rappresentata dal ciclo del passo (Baker,2014). La gait analysis non è di se per sé una metodica costosa poiché modelli di elaborazione delle immagini sempre più sofisticati permetteranno l’utilizzo di telecamere sempre più economiche. L’obiettivo della gait analysis nell’individuare la strategia più efficace da utilizzare nella riabilitazione del cammino non è confinato al contesto dei SEMLS (Single Event Multilevel Surgery), bensì è applicabile all’osservazione, valutazione e monitoraggio dei percorsi terapeutici di numerose patologie: tale metodica consente la cattura di dati di tipo cinematico, basati sull’analisi delle variazioni degli angoli articolari e sulle misurazioni dei parametri spazio-temporali, di tipo cinetico con la rilevazione delle forze esterne che perturbano lo schema del paziente come la gravità terrestre, l’inerzia, gli attriti e la GRF ( letteralmente Ground Reaction Force) e dell’EMG di superficie relativi all’attività elettrica sia dei muscoli superficiali che di quelli più profondi con l’utilizzo di appositi elettrodi. Prima di descrivere la funzione deambulatoria nel dettaglio è opportuno fare un introduzione generale su quelle che sono le basi di cinesiologia del movimento. Come suggerisce Boccardi (Boccardi,1977) l’analisi del movimento avviene sui 3 piani dello spazio:
Il movimento dei segmenti corporei in ognuno di questi piani avviene attorno ad un asse perpendicolare al piano stesso, pertanto:

Fig.1: Rappresentazione dei 3 piani dello spazio
La funzione cammino rappresenta una tappa fondamentale dello sviluppo del bambino, il quale sarà ora in grado di esplorare l’ambiente da una prospettiva del tutto nuova rispetto alla locomozione orizzontale. L’acquisizione della funzione deambulatoria avviene tipicamente tra il 12° ed il 18° mese nello sviluppo del bambino anche se con uno schema primitivo caratterizzato da base allargata, rigidità degli arti inferiori, co-attivazione di muscoli flessori ed estensori e appoggio di pianta: tuttavia con l’esercizio costante verranno in seguito sviluppate strategie riconducibili al cammino adulto. Gage nel 1991 individuò dei requisiti fondamentali per la maturazione di tale funzione:
Durante l’espressione del pattern deambulatorio possiamo idealmente separare il corpo in due unità: una definita come locomotrice responsabile del movimento e della progressione, e l’altra definita come “passeggera”, deputata al mantenimento posturale (Perry,1992). L’unità locomotrice sarà rappresentata dagli arti inferiori, mentre quella passeggera dalla metà superiore del corpo (capo, tronco, arti superiori). I ruoli dell’unità locomotrice nel cammino sono molteplici: accettare il carico, sostenere il corpo durante l’appoggio monopodalico e garantire l’avanzamento dell’arto. Come detto nel paragrafo precedente, la deambulazione si presta ad essere analizzata e confrontata con individui con sviluppo tipico per il fatto di essere costituita dalla ripetizione di un’unità funzionale, rappresentata dal ciclo del passo. Il ciclo del passo si suddivide in due grandi fasi: la stance (fase di appoggio) e la swing (fase di oscillazione). La stance a sua volta si suddivide in 3 fasi di doppio appoggio nel quale entrambi i piedi sono a contatto col suolo ed in 2 fasi di appoggio monopodalico nella quale l’arto inferiore sosterrà per intero il peso del corpo; la swing sarà invece costituita da 3 fasi che descriveranno la traiettoria percorsa dell’arto in volo durante la progressione. Per convenzione, il ciclo del passo incomincia con la fase di iniziale contatto nella quale il piede di riferimento impatta con il terreno tramite l’appoggio iniziale di tallone (“heel strike”).

Fig.2: Initial Contact (0-2% del ciclo del passo)
La fase di Initial Contact rappresenta l’intervallo compreso tra lo 0 ed il 2 % del ciclo del passo e consiste nel contatto iniziale del piede al suolo che avviene di tallone (heel strike). La GRF nell’arto in Initial Contact è localizzata anteriormente a livello di anca e ginocchio e posteriormente rispetto alla tibio-tarsica. Nell’anca verrà indotto un momento flessorio contrastato dalla contrazione concentrica dei muscoli estensori (grande gluteo ed ischiocrurali) mentre il ginocchio risulta esteso senza che sia necessaria un’attivazione muscolare. A livello della caviglia verrà indotto un momento plantiflessorio controllato della contrazione eccentrica dei muscoli dorsiflessori con un maggior contributo del tibiale anteriore.

Fig.3: Loading Response (0-10% del ciclo del passo)
La fase successiva, che rappresenta l’intervallo temporale situato tra lo 0 ed il 10% del ciclo del passo, prende il nome di accettazione del carico o Loading Response: il nostro arto di riferimento trasferirà su di sé il peso del corpo, gettando le basi per quella che sarà la fase di appoggio monopodalico. Nell’accettazione del carico, l’azione muscolare dell’unità locomotrice ha un triplice ruolo: assorbire
l’impatto con il suolo, garantire la stabilità sotto carico e conservare la progressione (Perry,1992). Il completamento del rotolamento sul calcagno consente la progressione dell’arto e determina uno spostamento della GRF posteriore a livello di anca e ginocchio ed anteriore rispetto alla tibiotarsica, la quale si trova di 10° in flessione plantare. Mentre nell’anca continua il momento flessorio e la conseguente contrazione concentrica degli estensori, la conclusione del processo di rotolamento sul calcagno ad opera dell’azione eccentrica del tibiale anteriore trascina la tibia in avanti con la coscia che viene mantenuta al contempo arretrata, determinando un momento flessorio di grande entità a livello del ginocchio. La flessione del ginocchio verrà controllata dall’azione eccentrica del quadricipite, con maggiore coinvolgimento dei tre vasti rispetto al retto femorale (Borelli et al.,2014): tale processo consentirà di assorbire l’impatto con il suolo in combinazione al valgismo dell’articolazione sottoastragalica (Perry,1992). Sul piano frontale invece la GRF determinerà un momento adduttorio all’anca che verrà contrastato dall’azione concentrica dei muscoli abduttori quali medio gluteo e tensore della fascia lata. La stabilità sotto carico viene così consentita principalmente dal controllo della flessione di ginocchio e della componente flesso-adduttoria dell’anca (Borelli et al.,2014).
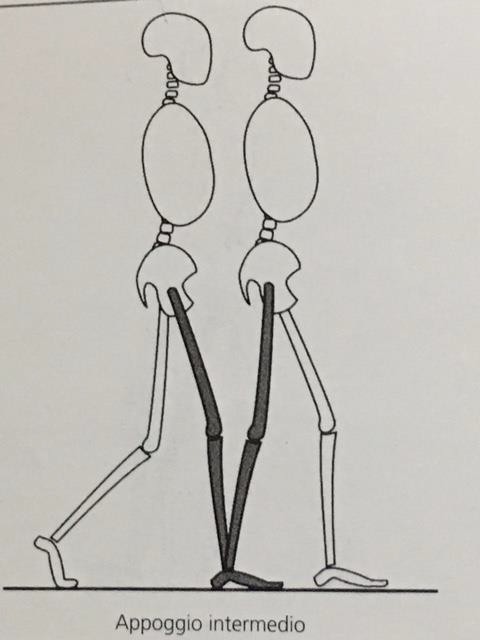
Fig.3: Mid stance (10-30% del ciclo del passo)
La Mid Stance, situata nell’intervallo temporale tra il 10 ed il 30 % del ciclo del passo, rappresenta la fase iniziale di appoggio monopodalico. Lo scopo di questa fase è sostenere il peso del corpo per consentire la progressione in volo dell’arto controlaterale fino al raggiungimento della verticale (in letteratura definito come “zenith cross”). La GRF si sposta posteriormente rispetto all’anca ed anteriormente rispetto al ginocchio ed alla caviglia: ciò induce un momento dorsiflessorio a livello della tibiotarsica che, se non controllato, comprometterebbe l’estensione di ginocchio e di riflesso la stabilità dell’arto in carico. Durante questa fase si realizza il secondo rotolamento sulla tibiotarsica (“second rocker”): ciò avviene mediante lo spostamento della tibia in avanti indotto dalla GRF a chiudere l’angolo con il piede, consentendo la progressione del corpo in avanti. L’attivazione in eccentrica del soleo, coadiuvato dal contributo del gastrocnemio (Perry,1992) diventa pertanto provvidenziale per bloccare la tibiotarsica in flessione dorsale di 5° e per mantenere la GRF anteriore rispetto al ginocchio, consentendone l’estensione senza l’intervento di altre forze muscolari e, di riflesso, la stabilità sull’arto in carico. L’anca riduce la flessione di circa 20° portandosi nella sua condizione fisiologica (10° gradi di flessione con bacino leggermente antiverso); sul piano frontale restano attivi il medio gluteo ed il tensore della fascia lata per contrastare il momento adduttorio ed impedire la caduta controlaterale di bacino, mentre sul piano trasverso la rotazione interna dell’arto in swing determina una rotazione esterna dell’arto in Mid Stance (Borelli et al.,2014).

Fig.4: Terminal Stance (30-50% del ciclo del passo)
Al passaggio della verticale da parte dell’arto in volo, entriamo in Terminal Stance nell’arto in appoggio. Lo scopo di questa fase, corrispondente all’intervallo temporale compreso tra il 30 ed il 50 % del ciclo del passo, è garantire la progressione del corpo oltre il piede in appoggio e consentire al tempo stesso un adeguata lunghezza del passo. La GRF si sposta anteriormente nel piede fino a raggiungere le metatarsofalangee: l’aumentato momento dorsiflessorio alla caviglia viene contenuto dall’azione eccentrica del soleo che blocca la tibiotasica in flessione dorsale di circa 10°. Il peso del corpo in caduta libera determina il sollevamento del tallone dal suolo: ciò avvia il terzo rotolamento sulle metatarsofalangee (“terzo rocker”), meccanismo che sostiene la progressione e porta gradualmente le dita in flessione dorsale di circa 20° (Borelli et al., 2014). L’estensione del ginocchio e dell’anca in questa fase è garantita dall’azione eccentrica del tricipite surale che gioca un ruolo fondamentale nella stabilità dell’arto in carico: tuttavia la posizione arretrata della coscia rispetto alla tibia durante il rotolamento sulle metatarsofalangee determina uno spostamento posteriore della GRF nei confronti del ginocchio, il quale alla fine della Terminal Stance inizia il suo momento flessorio.

Fig.5: Pre-Swing (50-60% del ciclo del passo)
La fase di Pre Swing, corrispondente all’ intervallo temporale compreso tra il 50 ed il 60 % del ciclo del passo è la fase terminale di doppio appoggio ed ha due obiettivi fondamentali: consentire la progressione in avanti mediante il meccanismo di push-off ad opera del tricipite surale e pre- posizionare l’arto per l’oscillazione (Borelli et al.,2014). Il trasferimento del carico sull’arto che ha completato l’avanzamento libera il tricipite surale dall’azione di stabilizzatore, consentendogli di esercitare un’azione concentrica plantiflessoria a livello della tibiotarsica e flessoria a livello del ginocchio rispettivamente di 20 e 40 gradi circa. Un’eccessiva flessione di ginocchio determina l’attivazione ed il relativo controllo da parte del retto femorale che assiste contemporaneamente alla flessione d’anca (Perry, 1992). L’azione del tricipite surale tuttavia si esaurisce nelle fasi iniziali della Pre Swing permettendo l’attivazione preventiva dei muscoli pretibiali, tra i quali spicca il tibiale anteriore: la tibiotarsica, per assicurare una clearance del piede durante la swing, dovrà infatti recuperare 15° gradi in dorsiflessione nella fase iniziale di volo.

Fig.6: Initial Swing (60-73% del ciclo del passo)
Con il distacco del piede al suolo (descritto in letteratura come “foot-off”) inizia la fase di Initial Swing, corrispondente all’ intervallo temporale compreso tra il 60 ed il 73 % del ciclo del passo. Tale fase ha come obiettivi principale un’adeguata clearance del piede (sollevamento del piede dal suolo) e l’avanzamento dell’arto in volo. I meccanismi che consentono la realizzazione delle funzioni necessarie sono:
La fase di oscillazione iniziale termina quando l’arto in volo raggiunge la verticale (zenith cross).

Fig.7: Mid Swing (70-85 % del ciclo del passo)
La fase di oscillazione che segue all’ Initial Swing è la Mid Swing, corrispondente all’ intervallo temporale compreso tra il 75 e l’80 % del ciclo del passo. La funzione principale dell’attività muscolare in tale fase è consentire la progressione, portando la tibia perpendicolare al suolo. Come descritto per l’Initial Swing, anche nella Mid Swing i meccanismi che consentono la progressione dell’arto in volo sono essenzialmente 3:

Fig.9: Terminal Swing (85-100% del ciclo del passo)
La fase di Terminal Swing, corrispondente all’ intervallo temporale compreso tra l’85 ed il 100 % del ciclo del passo, rappresenta la fase terminale dell’oscillazione, determinandone la transizione con la fase di iniziale appoggio successiva. L’obiettivo principale a cui deve attingere l’attività muscolare è il pre-posizionamento dell’arto all’iniziale contatto. L’ulteriore flessione di anca è inibita dall’ attivazione in eccentrica degli ischiocrurali (semimembranoso, semitendinoso e bicipite femorale). L’azione degli ischiocrurali determina inoltre un controllo dell’estensione del ginocchio, la quale verrà tuttavia completata dalla successiva attivazione preventiva del quadricipite femorale, preparando la suddetta articolazione ad attutire l’impatto imminente. I muscoli pretibiali restano attivi, determinando la posizione neutra o leggermente plantiflessa (5° circa) della tibiotarsica e preparando il piede per l’iniziale contatto successivo.
Attualmente è stato elaborato un protocollo standard su come condurre la gait analysis (Baker,2013). Il paziente si presenterà con un’adeguata documentazione clinica e gli verrà chiesto di cambiarsi (poiché parliamo di soggetti in età evolutiva è sottointeso il coinvolgimento dei genitori in questa fase) con un abbigliamento idoneo. Successivamente il tecnico responsabile eseguirà un esame fisico quantitativo accompagnato da misure antropometriche per la rilevazione delle dimensioni e delle proporzioni dei segmenti corporei. In seguito verranno posizionati dei marker passivi nei punti di repere anatomico secondo un preciso protocollo: essi sono costituiti da sfere catarifrangenti e vengono applicati a diretto contatto con la pelle tramite un nastro biadesivo. La cattura e l’isolamento della posizione dei marker nello spazio è possibile grazie alla caratteristica catarifrangente delle sfere, le quali riflettono le luci infrarosse generate dalle unità stroboscopiche che circondano le lenti di ciascuna videocamera. L’analisi cinematica si basa sull’ipotesi della divisione del corpo in segmenti rigidi: la posizione ogni segmento nello spazio è definita da sei coordinate indipendenti, delle quali tre di natura cartesiana (x, y, z) e tre legate agli angoli di rotazione. Gli obiettivi del protocollo sono in linea di massima:
È importante che il protocollo definisca una corretta correlazione tra la posizione dei marker ed i segmenti ossei sottostanti: per individuare il centro di massa relativo di ciascun segmento è sufficiente il posizionamento di tre marker. Un software permette l’elaborazione in 3D delle immagini provenienti dalle videocamere: tale processo prende il nome di ricostruzione e si avvale di due metodiche di elaborazione dei dati che sono la sogliatura e la cross-correlazione. Prima di incominciare l’analisi vera e propria, il modello necessita di una calibrazione. Successivamente verrà chiesto al paziente di percorrere una distanza compresa tra i 6 ed i 10 metri, ripetendo il percorso dalle 10 alle 20 volte. La prassi vuole che il paziente cammini inizialmente scalzo e solo successivamente con l’utilizzo di ortesi o ausili per il cammino. Esiste anche un sistema alternativo optoelettronico costituito da marker attivi che sono in grado di generare autonomamente un segnale luminoso LED. Con l’analisi cinematica è possibile rilevare i parametri spazio-temporali del cammino, che sono:
Nella misurazione dei dati di tipo cinematico è possibile incombere in 3 tipi di errori: errori strumentali, errori nella determinazione delle coordinate dei punti di repere ed errori derivanti da artefatti dei tessuti molli. Gli errori strumentali dipendono dalle caratteristiche dei dispositivi utilizzati alla gait analysis: possono essere sistematici se legati al modello di calibrazione oppure causali se correlate con il processo di digitalizzazione, il quale consente di trasformare in dati numerici le coordinate dei marcatori. Gli errori derivanti dalla determinazione delle coordinate dei punti di repere sono legate sia al fatto che gli RA si presentano interni o sottocutanei e che le loro superfici sono irregolari, sia che il tecnico possa aver utilizzato tecniche di palpazione inadeguate. L’artefatto dei tessuti molli è un errore derivante dallo spostamento tra marker e struttura ossea durante il movimento: esso viene determinato dai tessuti molli che si interpongono come cute, tessuto adiposo e muscolare. In relazione a quanto appena descritto la qualità dei dati cinematici è determinata dalla competenza nel posizionamento dei marker e nella quantità di artefatti dei tessuti molli (Baker,2014). Mentre per i dati di tipo cinematico è sufficiente il sistema stereofotogrammetrico descritto in precedenza, lo stesso discorso non vale per i dati di tipo cinetico e quelli riguardanti l’attività elettrica muscolare. Per rilevare dati cinetici è necessario l’utilizzo di una piattaforma di forza, la quale sia in grado di rilevare sia il punto di applicazione della GRF (CoP, Centro di pressione) sia le sue componenti sui 3 piani dello spazio. Esistono due tipologie di pedane di forza: quelle che utilizzano sensori piezoelettrici e quelle che al contrario sono fornite di sensori strain gauge. I dati di tipo cinetico possono essere utilizzati in combinazione con quelli di tipo cinematico per il calcolo dei momenti articolari: tale processo prende il nome di dinamica inversa (Winter,2009). La dinamica inversa ci permette di calcolare le forze interne, ovvero i momenti e le potenze agenti sulle strutture articolari determinate dall’ attività dei muscoli agonisti ed antagonisti. L’EMG di superficie è un procedimento che consente la registrazione dell’attività elettrica prodotta dalle singole unità motorie: esso può essere svolto sia in concomitanza con l’analisi dei dati cinematici e cinetici sia in sede separata. L’attività elettrica dei grandi muscoli superficiali può essere misurata utilizzando coppie di elettrodi semplici, i quali verranno direttamente applicati nella cute del paziente (Baker,2013). Per i piccoli muscoli e per quelli più profondi può rendersi necessario l’utilizzo di elettrodi fine-wire invasivi ed ad alta sensibilità. (Baker,2014).
Il cammino è un’attività estremamente vantaggiosa dal punto di vista energetico: in condizioni di normalità richiede un consumo equivalente a circa il 38 % della massima capacità aerobica, nominata più comunemente VO2MAX (Perry,1992). La conservazione di energia è data da meccanismi che consentano un‘attività muscolare a ridotta intensità (potenza generata), spesa energetica (quantitativo di ATP richiesto) e durata. I meccanismi con la quale il SNC adibisce al risparmio energetico sono essenzialmente tre:
Per minimizzazioni delle escursioni del centro di massa intendiamo tutti gli aggiustamenti che vengono fatti sui tre piani dello spazio per ridurre il più possibile gli spostamenti verticali e trasversali del centro di gravità. Questi movimenti che Saunders nominò nel 1953 “determinanti del cammino” sono rappresentati: dalla rotazione interna in avanzamento, dallo spostamento laterale e dalla caduta controlaterale della pelvi, dalle azioni della tibiotarsica per elevare il centro di gravità sia con il sollevamento del tallone in Terminal Stance che con il contatto di tallone controlaterale in Initial Contact e dai movimenti congiunti della tibiotarsica e del ginocchio soprattutto in Loading Response ed in Mid Stance (Perry,1992). Il controllo dei momenti articolari è il secondo processo fondamentale che il SNC organizza per risparmiare energia: avvicinando i centri articolari di anca, ginocchio e tibiotarsica alla GRF è possibile ridurre il braccio di leva indotto da quest’ultima e, di conseguenza, minimizzare lo sforzo muscolare impiegato nella deambulazione. L’esempio più comunemente citato è il controllo del momento dorsiflessorio alla tibiotarsica in fase di Mid Stance ad opera dell’azione eccentrica del soleo, il quale consente al ginocchio di estendersi senza alcun intervento muscolare poiché situato posteriormente rispetto alla GRF. Il terzo ed ultimo meccanismo è rappresentato dal trasferimento attivo di energia tra i segmenti corporei: ad esempio tra la fine della Pre Swing e la fase iniziale di oscillazione il retto femorale si comporta sia come acceleratore concentrico all’anca, sia come deceleratore eccentrico al ginocchio controllando il momento flessorio. Il risultato sarà un trasferimento di energia da parte del retto femorale dal suo capo distale a quello prossimale con una contrazione essenzialmente isometrica. È stato dimostrato che il trasferimento di energia tra segmenti non adiacenti è il ruolo principale dei muscoli biarticolari, con un risparmio energetico tra l’8 ed il 22 % (York,1988).