I primi studi sul controllo nervoso del cammino sono di TG Brown e risalgono al 1911. Volti a identificare le strutture implicate nell’attivazione dei pattern di base del cammino, questi studi hanno dimostrato la presenza nei subprimati di reti neurali, contenute interamente nel midollo spinale, responsabili della generazione dei movimenti ritmici complessi propri della deambulazione. Questi circuiti (CPG, Central Pattern Generator) hanno dimostrato di essere in grado, da soli, di consentire l’innesco dei movimenti tipici della deambulazione, indipendentemente dal controllo esercitato dai centri superiori e dalle informazioni provenienti dalla periferia recettoriale.
Successivi esperimenti di separazione completa del midollo spinale dai centri sopraspinali e di sezione delle radici posteriori effettuati sui subprimati hanno portato alla medesima conclusione (Grillner, 1973, 1981; Taub, 1976).
A differenza dei gatti e di altri animali quadrupedi, l’uomo con lesione spinale completa non è in grado di attivare il pattern locomotorio se posto in sospensione su un nastro trasportatore. Alcune osservazioni hanno invece dimostrato l’attivazione dello schema primitivo del passo (marcia automatica) in neonati anencefalici sopravvissuti per qualche giorno dopo la nascita (Peiper, 1961). Quest’ultimo dato, insieme all’osservazione che lo schema della marcia automatica è attivo nel feto e nel neonato, dove i centri inferiori sono ancora in gran parte disconnessi dai centri superiori, suggerisce la presenza anche nell’uomo di circuiti neuronali di base geneticamente predeterminati (CPG), localizzati a livello sottocorticale (Crenna, 1985).
La maggior parte dei modelli di CPG prevede l’esistenza di due centri tra loro accoppiati, uno dei quali genera il segnale che sarebbe destinato ai muscoli attivi durante la fase di sospensione, mentre l’altro sarebbe responsabile dell’attivazione dei muscoli implicati nella fase d’appoggio. Viene anche ipotizzata l’esistenza di un CPG per ciascun arto (Crenna, 1985).
Il CPG è in grado da solo di attivare le sinergie elementari caratteristiche della deambulazione (reazione segnapassi). Per garantire la naturale e armoniosa espressione dell’attività deambulatoria e fare sì che la reazione segnapassi, automatica e stereotipata, venga trasformata in cammino funzionale, è necessario che tale reazione sia sostenuta da un adeguato supporto posturale e possa essere adattata in ogni istante alle condizioni dell’ambiente esterno (Forrsberg et al., 1975; Andersson e Grillner, 1981; Crenna e Frigo, 1983; Crenna, 1985).
Le afferenze periferiche rivestono quindi un ruolo fondamentale per il controllo della deambulazione: raccolgono le informazioni necessarie per l’organizzazione dell’azione, segnalano eventuali errori nell’esecuzione guidandone la correlazione e, infine, avvisano della presenza di elementi perturbanti esterni inaspettati che esigono risposte adattive immediate (riflessi).
La vista identifica l’obiettivo da raggiungere, indica la direzione da seguire e rivela la presenza di eventuali ostacoli che possano richiedere una modificazione dell’azione; i propriocettori segnalano la posizione e i movimenti degli arti (recettori articolari e muscolari), le lunghezze e le tensioni muscolari (fusi neuromuscolari e organi del Golgi), l’orientamento e le variazioni di posizione del capo (recettori vestibolari); i recettori cutanei, infine, indicano le pressioni e le trazioni esercitate dal movimento sulla cute.
Particolarmente interessanti sono gli studi riguardanti l’influenza delle afferenze provenienti dai recettori muscolari e labirintici nel controllo della deambulazione. Le afferenze propriocettive provenienti dai fusi neuromuscolari sarebbero responsabili del passaggio dalla fase di appoggio a quella di sospensione per effetto dell’innesco del riflesso da stiramento dei muscoli flessori dell’anca (ileopsoas e retto femorale) nella fase terminale dell’appoggio; questi, stirati, si contraggono dando inizio alla fase di sospensione. Viceversa, gli estensori dell’anca (ischiocrurali e glutei) interverrebbero nell’oscillazione terminale per dare inizio alla fase di appoggio (Forrsberg et al., 1975).
Le afferenze provenienti dai labirinti (macule e creste acustiche) segnalano le accelerazioni lineari e angolari del capo nello spazio, ovvero l’inizio e la fine di un moto lineare, quali l’avvio o l’arresto di una marcia in linea retta e l’inizio e la fine delle rotazioni del capo su qualsiasi piano dello spazio, come avviene nell’affrontare una curva o un cambiamento di pendenza. In queste situazioni, il mantenimento dell’equilibrio del corpo, che tenderebbe a cadere per effetto delle forze gravitazionali e inerziali (caduta all’indietro in occasione dell’avvio o dell’aumento della velocità del cammino in linea retta, caduta in avanti in occasione dell’arresto o della riduzione della velocità del cammino in linea retta, caduta verso l’esterno durante una curva per azione della forza centrifuga ecc.) è garantito dall’attivazione dei riflessi vestibolospinali e quindi della muscolatura degli arti e del tronco che si oppone alla caduta (aggiustamento posturale). Si noti come sia le sensibilità dei recettori sia le risposte alla loro attivazione siano modulate finemente dai centri superiori, nel senso che questi ultimi sono in grado di regolare la soglia di eccitabilità dei recettori periferici e di influenzare l’entità di risposta riflessa alla loro attivazione (incremento-inibizione) in base alle necessità del momento.
Oltre che alle afferenze periferiche, i CPG sono normalmente soggetti a un controllo costante da parte dei centri superiori. Come qualsiasi azione messa in atto per soddisfare un bisogno biologicamente significativo, il cammino è il risultato di un complesso processo centrale e periferico dove gli aspetti motivazionali, percettivi, cognitivi, organizzativi, esecutivi e di controllo sono strettamente integrati. Vi è sempre un intervento cosciente nell’organizzazione/controllo del cammino, delegata alle parti più “nobili” del cervello (aree associative della corteccia, in particolare i lobi prefrontali), ai quali spetta la formulazione degli scopi, il controllo generale e la verifica dei risultati dell’azione. Inoltre, vi è sempre un controllo automatico del cammino, deputato al controllo dei dettagli esecutivi, degli aggiustamenti posturali, dell’equilibrio e delle eventuali correzioni dell’azione in corso d’opera, delegato a strutture filogeneticamente più antiche (gangli della base, cervelletto, tronco dell’encefalo, aree corticali primarie).
La reazione segnapassi, pattern di base del cammino, ne costituisce un ingrediente fondamentale, incapace però di per sé di realizzare un’azione competente se non inserito all’interno di un sistema funzionale comprendente strutture cortico-sottocorticali e periferiche operanti in armonia (sistema funzionale della locomozione).
La dimostrazione della necessità dell’interazione armonica tra strutture centrali e periferiche e, d’altra parte, dei limiti della attivazione dei soli CPG per la realizzazione della funzione deambulatoria matura, viene dall’osservazione del cammino del neonato, nel quali i centri inferiori sono in gran parte ancora disconnessi dai centri superiori, e del cammino nei bambini con PCI, nel quale la lesione centrale altera l’armonica integrazione tra le diverse componenti del sistema funzionale deambulatorio. In tutti questi casi, le sinergie basali del cammino possono ancora essere presenti, ma sono incapaci di coniugarsi con altri elementi essenziali per poter realizzare una funzione competente: può essere assente la consapevolezza degli scopi, o possono essere presenti difetti della sfera affettiva-percettiva-cognitiva con conseguente incapacità di organizzare l’azione (incapacità di utilizzo del repertorio disponibile per l’organizzazione dell’azione, difetti di orientamento e di direzionamento, difficoltà di integrazione visuocinestesica ecc.), o difetti inerenti il controllo posturale (reazioni di equilibrio, di soppesamento ecc.) o l’aggiustamento dell’azione in corso d’opera.
Considerando che il cammino è un atto motorio ciclico e ripetibile, è possibile isolarne un modulo definito ciclo del passo (gait cycle o stride), intendendo con ciò tutti i fenomeni che avvengono tra due successivi istanti di contatto dello stesso piede al suolo (strike), per convenzione il piede destro. Ogni ciclo è suddiviso in due periodi: appoggio (stance) e oscillazione (swing). Ogni passo comprende due semipassi (step), rappresentati dall’intervallo compreso tra il contatto iniziale a terra di un piede e il contatto del piede controlaterale. Volendo essere rigorosi, questo termine (semipasso) è corretto solo in caso di cammino “normale” idealmente simmetrico, dove i due semipassi sono due metà quasi identiche dello stesso ciclo del passo; nel cammino patologico sono spesso presenti asimmetrie e si analizzano separatamente i “semipassi” destro e sinistro.
Si distinguono quindi:
Dal punto di vista funzionale il ciclo del passo viene suddiviso in 8 fasi:
1. Contatto iniziale (IC, initial contact) – 0,2% (Fig. 7).
Fisiologicamente il contatto iniziale al suolo avviene con il calcagno, tanto che gli autori anglosassoni parlano di heel strike (impatto del tallone). Questo evento non avviene quasi mai nei soggetti affetti da PCI, dove il contatto del piede al suolo si realizza di solito di punta (inversione dello schema del passo) o nel migliore dei casi di pianta. In questa brevissima fase, il piede si presenta in posizione neutra alla tibiotarsica, il ginocchio è quasi esteso e l’anca flessa di circa 30° (questo valore aumenta se vi è un’antiversione del bacino). La Ground Force Reaction (GFR) viene a trovarsi posteriormente alla tibiotarsica, generando un momento esterno plantiflessorio, a cui si oppongono i muscoli pretibiali (tibiale anteriore, estensore lungo dell’alluce [ELA] ed estensore comune delle dita [ECD]) con una contrazione eccentrica che frena la caduta verso il suolo dell’avampiede per attutirne l’attrito. Si avvia così il rotolamento sul calcagno (1° rocker), che si completa nella fase successiva alla load response e che è uno dei meccanismi coadiuvanti la progressione. L’attività combinata dei muscoli pretibiali (con componenti supinatorie e pronatorie) mantiene l’articolazione sottoastragalica in posizione neutra. La GFR passa posteriormente al ginocchio, dove genera un momento esterno debolmente flessorio, e anteriormente all’anca, dove genera un momento esterno decisamente flessorio cui si oppone l’azione dei muscoli glutei e degli ischiocrurali per mantenere l’articolazione estesa. Anche il quadricipite risulta attivo, non per un suo ruolo al contatto iniziale, ma a scopo anticipatorio rispetto all’accettazione del carico (load response) che sta per avvenire, per controllare la potenziale flessione del ginocchio. La posizione del piede all’IC è determinata dal pre-posizionamento dell’arto inferiore alla fine della fase di swing: ogni alterazione del contatto iniziale deve essere valutata a partire da questa fase (TSw).

Figura 7 – Initial contact
2. Risposta al carico (LR, load response) – 2-10% (Fig. 8).
Gli obiettivi di questa fase sono l’assorbimento dell’impatto del peso del corpo che, provenendo dall’arto controlaterale, viene trasferito sul piede, la stabilità sotto carico e il mantenimento della progressione. La GRF, che inizialmente è allineata posteriormente alla tibiotarsica e anteriormente a ginocchio e anca, diviene rapidamente posteriore al ginocchio, introducendo un momento esterno flessorio cui si contrappone l’azione del quadricipite; si mantiene inoltre interna rispetto alle articolazioni di ginocchio e anca generando un momento adduttorio, maggiore all’anca per il braccio di leva più grande (Perry, 1992). Nella load response si conclude il rotolamento sul calcagno, controllato dalla contrazione eccentrica dei muscoli pretibiali, che concedono fino a 10° di plantiflessione affinché il piede raggiunga il suolo senza richiedere un eccessivo avanzamento della tibia (che determinerebbe un aumento del momento flessorio al ginocchio), contribuendo così ad attutire l’impatto, ad aumentare la base di appoggio e a mantenere la progressione del corpo. Il rotolamento del piede al suolo è paragonabile ai movimenti di rollio e beccheggio di una barca: oltre al passaggio dell’appoggio dal tallone alla pianta, si osserva infatti “l’atterraggio” prima del quinto metatarso, poi gradualmente di tutto l’avampiede, con progressione lateromediale fino al contatto del primo metatarso. L’articolazione sottoastragalica passa in pronazione (determinando circa 8° di valgismo del calcagno).
Diversi fenomeni contribuiscono ad attutire l’impatto:
Il momento flessorio al ginocchio è introdotto dall’azione dei muscoli pretibiali, che trascinano la tibia anteriormente alla GRF, mentre l’inerzia mantiene la coscia arretrata. Esso viene controllato dall’azione del quadricipite femorale (principalmente i tre muscoli vasti, poiché il retto femorale raramente viene coinvolto in questa fase) che concede al massimo 15° di flessione. Il ginocchio subisce anche un minimo momento adduttorio (per l’allineamento interno della GRF) e intrarotatorio (a partenza dal piede), che viene controllato dall’azione del capo lungo del bicipite femorale e dalla bandelletta ileotibiale.
L’anca è flessa di circa 30° (considerando una antiversione di bacino di 10° come fisiologica) e subisce un momento esterno flessorio contrastato dall’azione dei muscoli grande gluteo e grande adduttore con il contributo degli ischiocrurali. Questi hanno probabilmente un certo ruolo anche nello stabilizzare il ginocchio, insieme con il legamento crociato anteriore, poiché si oppongono alla forza di taglio anteriore generata dal quadricipite. Il momento adduttorio è maggiore all’anca rispetto al ginocchio a causa del maggiore braccio di leva (distanza laterale dell’articolazione rispetto alla GRF); a esso si oppone l’azione dei muscoli piccolo e medio gluteo, dei fasci superiori del grande gluteo e del tensore della fascia lata. La muscolatura estensoria lombare mantiene l’allineamento del tronco, controllandone il momento flessorio esterno. La stabilità sotto carico è garantita dal mantenimento di un assetto adeguato in ogni stazione articolare, in particolare dal controllo della flessione del ginocchio e della flessione-adduzione dell’anca.

Figura 8 – Load response
3. Appoggio intermedio (MSt, mid stance) – 10-30% (Fig. 9).
Inizia quando il piede controlaterale si solleva e termina quando la GRF è allineata sull’avampiede.
L’obiettivo di questa fase è mantenere la progressione e la stabilità sotto carico, con particolare attenzione al momento dello zenith cross, in cui avviene il sorpasso dell’arto in appoggio da parte di quello controlaterale in volo. In questo particolare momento l’arto in appoggio deve essere più lungo di quello in sospensione, per evitare l’attrito al suolo del piede in volo (cleareance). In questa fase possono verificarsi delle criticità perché una perdita di stabilità dell’arto in appoggio o un aumento della lunghezza di quello in volo possono compromettere la cleareance (distanza del piede dal suolo). Esistono diverse modalità compensatorie per garantire comunque la clearenace dell’arto in volo, ed evitare di inciampare o cadere: aumento della flessione di anca e ginocchio dell’arto in volo, o steppage, controlateral vaulting, pelvic hike, pendolo frontale di tronco, extrarotazione-abduzione della coscia in volo. Questi compensi aumentano il consumo energetico nel cammino (misurabile come consumo di ossigeno), fino a portare a una riduzione della resistenza e quindi dell’autonomia. La mid stance inizia quando il carico è stato completamente trasferito sull’arto in appoggio, mentre il controlaterale si solleva dal suolo. La GRF si presenta inizialmente quasi allineata alla tibiotarsica, ancora per poco posteriore al ginocchio e anteriore all’anca, per poi portarsi gradualmente anteriore alla tibiotarsica e al ginocchio e posteriore all’anca. Durante questa fase si realizza il rotolamento sulla tibiotarsica (2° rocker), con l’avanzamento della tibia. Il passaggio è molto rapido nella prima parte della mid stance, dai 10° di plantiflessione alla posizione neutra, più lento nella seconda metà, dove vengono raggiunti circa 5° di dorsiflessione, mentre la GRF passa anteriormente alla tibiotarsica avvicinandosi all’avampiede (tallone ancora in appoggio). Questo movimento viene prodotto dalla spinta in avanti prodotta dall’arto controlaterale in volo (pendolo) ed è controllato dal tricipite surale che rallenta l’avanzamento della tibia: non appena la GRF supera la tibiotarsica si attiva il soleo e con un lieve ritardo si aggiunge il gastrocnemio. In questo modo il controllo attivo della stabilità viene trasferito dal ginocchio alla tibiotarsica: la GRF infatti passa da posteriore ad anteriore al ginocchio, che risolve la flessione della fase precedente e si estende. Il momento esterno è divenuto estensorio e non è più necessaria l’azione muscolare del quadricipite, essendo la stabilità garantita dalle strutture capsulolegamentose. Diventa chiaro il ruolo fondamentale del soleo nello stabilizzare la tibia (avendo come punto fisso il piede) e quindi il ginocchio allo zenith cross, garantendo un’efficace cleareance dell’arto controlaterale in volo. Infatti, se la tibia non viene stabilizzata dal soleo, il ginocchio non si estende, conservando un momento flessorio. Ogni meccanismo che comprometta questa azione (eccessiva lunghezza iatrogena del tendine d’Achille, alterato braccio di leva al piede per cedimento in eccessiva valgo-pronazione) induce un rapido ed eccessivo avanzamento della tibia e un cedimento in talo del piede e promuove l’evoluzione verso il crouch gait (cammino a ginocchia flesse, con sfibramento del tendine sottorotuleo e risalita della rotula). In questa situazione la contrazione del quadricipite, anziché promuovere l’estensione del ginocchio per contrastare il crouch, favorisce la flessione del tronco, con ulteriore cedimento della tibiotarsica.
All’inizio della mid stance il piede si presenta in pronazione con la sottoastragalica e la mediotarsica posteriore (lungo l’asse obliquo). Tale assetto permane per buona parte della mid stance, per consentire di accogliere il carico mentre questo viene trasferito verso l’avampiede.
La tenuta in pronazione della sottoastragalica è estremamente importante, poiché un eccessivo cedimento porterebbe a una perdita del braccio di leva dei muscoli plantiflessori. Sembra che il range di pronazione sia condizionato dalla conformazione dei capi ossei coinvolti (assi delle articolazioni e mediotarsica) e dalla tenuta delle strutture legamentose più che dall’azione muscolare (Michaud, 1997), anche se si riconosce un ruolo stabilizzante all’azione coordinata e contrapposta dei muscoli peronei lungo e breve e del tibiale posteriore. I muscoli pretibiali sono invece silenti. L’avanzamento dell’arto in volo induce una rotazione verso l’interno della pelvi sull’arto in appoggio, che a sua volta determina l’extrarotazione dello stesso. Questo meccanismo “trascina” con sé l’astragalo dell’arto in carico e verso la fine della mid stance la sottoastragalica inizia a supinare. Il movimento disallinea gli assi delle articolazioni calcaneo-cuboidea e astragalo-scafoidea (prima paralleli) bloccando la sottoastragalica, cosicché il piede diventa una leva rigida adatta a trasferire al suolo l’azione propulsiva del tricipite surale delle successive fasi. Sembra che questo meccanismo atto a mantenere la progressione sia un’acquisizione specifica dell’uomo e assente nei primati, che hanno ancora necessità di “piedi” in grado di afferrare oggetti o rami, anche a costo di una minor capacità propulsiva nel cammino bipede (Michaud, 1997). La supinazione è sostenuta dal tibiale posteriore e dal soleo e controllata dall’azione eccentrica dei muscoli peronei lungo e breve. Contemporaneamente la mediotarsica va in pronazione intorno al suo asse longitudinale, per garantire un’adeguata aderenza dell’avampiede al terreno.
L’anca riduce la flessione dai 30° iniziali fino a che la coscia si porta verticale, indicativamente a 10° di flessione che corrispondono alla posizione eretta fisiologica, considerando un’antiversione di bacino di 10°. Questo movimento avviene con minimo contributo iniziale del semimembranoso, ma fondamentalmente in modo passivo grazie al fatto che la GRF si trova posteriormente. Nel caso in cui il tronco si trovi antepulso, la GRF si sposta anteriormente all’anca reintroducendo un momento flessorio che richiede l’azione stabilizzante degli estensori dell’anca. Restano invece sempre attivi i muscoli medio e piccolo gluteo (con un picco iniziale al distacco del piede controlaterale) per evitare la caduta del bacino dal lato in volo, garantendo la stabilità in appoggio monopodalico.

Figura 9 – Mid stance
4. Appoggio terminale (TSt, terminal stance) – 30-50% (Fig. 10).
Inizia con il sollevamento del tallone dell’arto in appoggio e termina con il contatto dell’altro piede al suolo.
L’obiettivo di questa fase è garantire la progressione. La GRF si sposta ulteriormente in avanti raggiungendo le articolazioni metatarsofalangee, il corpo è in caduta libera verso l’avanti e rapidamente aumenta il momento dorsiflessorio alla tibiotarsica, controllato dal tricipite surale, che però ha perso il suo punto fisso di applicazione distale. Poiché il tallone non è più tenuto al suolo dal peso, la GRF solleva da terra il tallone stesso (con il contributo del flessore lungo delle dita), mentre la tibiotarsica raggiunge 10° di plantiflessione. Il distacco del tallone avvia il rotolamento sulle metatarsofalangee (MTF) (3° rocker) che sostiene la progressione portando gradualmente le dita in dorsiflessione fino a 20° circa. Il mesopiede viene stabilizzato grazie alla supinazione della sottoastragalica e della mediotarsica intorno all’asse obliquo, funzionando come una leva rigida. Il carico in questo momento è sostenuto solamente dall’avampiede che viene stabilizzato dall’azione concertata dei muscoli intrinseci e dei flessori lunghi delle dita e dell’alluce. In questa fase, per stabilizzare la colonna laterale del piede, acquista un ruolo significativo anche il peroneo lungo.
La tibia inizia ad avanzare più rapidamente della coscia portando il ginocchio (prima esteso) anteriormente alla GRF, anche grazie al contributo del gastrocnemio che avvia la flessione del ginocchio verso la fine della TSt. L’anca risolve completamente la flessione fino a raggiungere 10° di estensione (sempre in relazione al grado di antiversione del bacino), senza richieste funzionali ai muscoli prossimali se non agli abduttori, specie al medio gluteo, per stabilizzare il bacino sul piano frontale.

Figura 10 – Terminal stance
5. Pre-oscillazione (PreSw, pre swing) – 50-60% (Fig. 11).
Il pre swing è una fase di doppio appoggio, poiché il piede controlaterale ha perso contatto con il suolo e il carico viene rapidamente trasferito su di esso. Lo scopo di questa fase, oltre a mantenere la progressione in alto-avanti attraverso il push off, è il preposizionamento dell’arto per lo swing.
Solitamente si parla di push off intendendo la spinta propulsiva generata dal tricipite surale prima del distacco del piede da terra (toe off); alcuni invece parlano di roll on, sottolineando il ruolo del tricipite surale quale stabilizzatore della tibiotarsica e del ginocchio (per l’azione di freno dell’avanzamento della tibia), mentre il corpo è proiettato anteriormente (la GRF procede) ruotando sulle MTF. È possibile che un’azione di “spinta” si esprima maggiormente nel cammino veloce, e che nel cammino a velocità normale prevalga l’azione di “tenuta” sulla tibia. Di fatto il tricipite surale tende a spegnersi all’inizio del preSw (Perry, 1992). Si osserva una plantiflessione della tibiotarsica fino a circa 20° e la contemporanea flessione del ginocchio. Mentre si conclude il rotolamento sulle MTF (3° rocker), la GRF si sposta sulle dita che raggiungono 55° di dorsiflessione. Prosegue l’azione stabilizzante dei muscoli intrinseci, dei flessori lunghi delle dita e dell’alluce, così come il contributo del peroneo lungo. Questo agisce da plantiflessore del primo raggio (l’azione muscolare cambia in funzione dell’assetto in equino-supinazione) che viene mantenuto aderente al suolo, spostando medialmente la GRF dal quindi al primo metatarso, più parallela alla direzione di progressione del cammino, facilitando il trasferimento del carico sull’arto controlaterale.
Nella seconda parte del preSw, tuttavia, i muscoli della loggia posteriore e laterale della gamba si spengono per lasciare posto ai pretibiali (tibiale anteriore, estensore lungo delle dita e lungo dell’alluce) che si preparano a dorsiflettere rapidamente il piede dopo il distacco (initial swing), vincendo l’inerzia. Il reclutamento in preSw di questi muscoli è un elemento critico poiché un errore di timing, con ritardata attivazione, produce lo strisciamento delle dita al suolo, come si osserva talora nelle PCI, ostacolando la cleareance dell’arto in volo. È infatti sufficiente un ritardo di 2-3 decimi di secondo a compromettere la cleareance del piede dell’arto in volo allo zenith cross. L’elemento critico per il pre-posizionamento di terminal swing è la flessione del ginocchio, che inizia alla fine della TSt (con la GRF che diventa posteriore) quando il ginocchio viene “sbloccato” dal gastrocnemio, e prosegue in preSw fino a circa 40° di flessione, controllato dal retto femorale (non sempre necessariamente attivo), che contemporaneamente contribuisce ad avviare la flessione dell’anca. Questa flessione è prodotta dalla spinta distale a livello della tibiotarsica (push off o roll on) e dall’azione dell’adduttore lungo che, oltre a controllare il momento abduttorio generato dallo spostamento della GRF internamente all’anca con lo spostamento del carico sull’arto controlaterale, avvia la flessione dell’anca stessa. L’ileopsoas, il tensore della fascia lata e il sartorio contribuiscono alla flessione dell’anca.

Figura 11 – Pre swing
6. Oscillazione iniziale (ISw, initial swing) – 60-73% (Fig. 12).
Questa fase costituisce circa un terzo del periodo di oscillazione. Inizia con il distacco del piede dal suolo e termina quando l’arto in volo si trova affiancato a quello in appoggio (zenith cross). Obiettivo principale dell’ISw è il sollevamento del piede da terra, che si realizza grazie alla contemporanea flessione dell’anca (fino a circa 20-25°), la conseguente flessione del ginocchio (fino a 60°) e il recupero di una plantiflessione di 20° a una posizione quasi neutra (5° circa di dorsiflessione) del piede.
La flessione dell’anca è garantita dall’azione congiunta in contrazione concentrica dei muscoli iliaco, sartorio, adduttore lungo e gracile; quest’ultimo, insieme con il capo breve del bicipite, assiste anche la flessione del ginocchio, in parte determinata passivamente dall’inerzia tibiale.
La dorsiflessione della tibiotarsica è invece garantita dall’equilibrio tra i muscoli estensore lungo delle dita (componente di dorsiflessione-eversione) e tibiale anteriore-estensore lungo dell’alluce (componente di dorsiflessione-inversione), già attivi alla fine del preSw, dovendo in brevissimo tempo (frazioni di secondo) recuperare la plantiflessione della fase precedente.

Figura 12 – Initial swing
7. Oscillazione intermedia (MSw, mid swing) – 73-87% (Fig. 13).
L’obiettivo cruciale di questa fase è il sorpasso dell’arto in volo su quello in appoggio a zenith cross (in questa fase l’arto in volo deve risultare più corto di quello in appoggio) e il mantenimento della progressione.
Si realizza grazie a tre meccanismi:
o ulteriore flessione dell’anca fino a circa 35° sostenuta da un’attività minima dei flessori dell’anca;
o persistente attività dei muscoli tibiale anteriore ed estensore lungo delle dita e dell’alluce che portano la tibiotarsica in posizione quasi neutra;
o movimento pendolare della tibia generato passivamente dall’inerzia del segmento gamba-piede che riduce fino a 30° la flessione del ginocchio.
Nelle PCI, un’inadeguata flessione dell’anca o del ginocchio (già dalle fasi precedenti), oppure un errore di timing o la debolezza dei muscoli pretibiali che determinano un piede cadente, ostacolano la cleareance dell’arto in volo. Da non dimenticare anche il ruolo dell’arto in appoggio che deve garantire una sufficiente stabilità per permettere il superamento dello zenith: per esempio, un’inadeguata estensione del ginocchio in carico può compromettere la cleareance del piede in volo.

Figura 13 – Mid swing
8. Oscillazione terminale (TSw, terminal swing) – 87-100% (Fig. 14).
Questa fase finale dell’oscillazione inizia con la tibia verticale e termina quando il tallone prende contatto con il terreno; la gamba viene così a trovarsi anteriormente alla coscia.
La funzione di questa fase è la preparazione al contatto iniziale. Viene decelerata l’oscillazione anteriore della coscia, quindi inibita l’ulteriore flessione dell’anca, e viene rallentata l’estensione del ginocchio per proteggerlo dall’iperestensione e prepararlo ad ammortizzare il carico (si ferma a 5° di flessione). Queste due azioni sono garantite dall’attivazione eccentrica dei muscoli ischiocrurali, che si contraggono vigorosamente nella parte iniziale, mantenendosi comunque attivi fino alla fine, in preparazione al carico, per stabilizzare anca e ginocchio. Per lo stesso motivo si attivano alla fine del TSw anche i vasti, pronti a controllare il momento flessorio che a breve impegnerà il ginocchio. I pretibiali restano attivi per preparare il piede al contatto iniziale di tallone, mantenendo la tibiotarsica in posizione neutra o al limite concedendo 5° di plantiflessione.
Un’eccessiva o anticipata attività degli ischiocrurali, come spesso accade nelle PCI, blocca precocemente l’estensione del ginocchio, riducendo la lunghezza del passo anteriore e sollecitando il bacino in retroversione. Un errore di timing o la debolezza dei muscoli pretibiali determina un piede cadente e un contatto di pianta o di punta (inversione dello schema di appoggio).

Figura 14 – Terminal swing
Nella PCI, accanto ai problemi “periferici” (come debolezza e iperattività) sono presenti problemi “centrali” di controllo motorio che rendono molto più complesso e variegato il quadro clinico. Per ognuna di queste problematiche, ci limiteremo a una descrizione riassuntiva, prendendo in esame le stazioni articolari maggiormente coinvolte nel mantenimento della stazione eretta e della deambulazione: il tronco, il bacino, l’anca, il ginocchio e il piede.
Per controllare le deviazioni posturali minori indotte dal cammino a livello del tronco, è normalmente necessaria una minima quantità di attività muscolare. Per questo le variazioni nell’allineamento del tronco durante il cammino rappresentano più spesso adattamenti posturali che compensano un’inadeguata mobilità o un difettoso controllo muscolare di bacino, anca, ginocchio e tibiotarsica.
Le principali problematiche biomeccaniche e cinesiologiche a cui può andare incontro il tronco durante il cammino sono:
Inclinazione omolaterale del tronco
L’inclinazione omolaterale del tronco avviene quando il paziente sposta il tronco verso il lato dell’arto inferiore in appoggio; può essere legata a cause primitive o a elementi secondari (compensi). Tra le cause primitive troviamo la necessità di bilanciamento del tronco; tra quelle secondarie, la presenza di un’ipometria dell’arto inferiore omolaterale o la necessità di compensare situazioni quali:

Figura 15 – Inclinazione omolaterale del tronco per preservare l’allineamento della GRF quando una contrattura in flesso-adduzione della coscia causa una caduta del bacino controlaterale

Figura 16 – Segno di Duchenne. L’inclinazione omolaterale del tronco sposta la GRF sull’arto in appoggio per favorire i muscoli abduttori dell’anca deboli

Figura 17 – Schema falciante
Inclinazione controlaterale del tronco
Il soggetto inclina il tronco verso il lato dell’arto in volo. Le cause possono essere:
Pendolo frontale di tronco
Il pendolo frontale di tronco, se simmetrico, consente di conservare l’energia, ma si associa a difficoltà a iniziare e arrestare la marcia. Quando osserviamo un pendolo frontale di tronco dobbiamo pensare:
Inclinazione anteriore del tronco
L’inclinazione anteriore del tronco può essere conseguente a:

Figura 18 – L’antepulsione del tronco compensa la mancata flessione della tibia sul piede per la presenza di una contrattura del tricipite surale (equino nascosto)

Figura 19 – L’antepulsione del tronco compensa la debolezza del quadricipite mantenendo la linea di carico davanti all’asse del ginocchio. La tibia è trattenuta dal soleo
Inclinazione posteriore del tronco
Osserviamo un’inclinazione posteriore del tronco in caso di:

Figura 20 – Tronco inclinato posteriormente. Lo spostamento della GRF dietro l’articolazione dell’anca compensa la debolezza degli estensori dell’anca. L’estensione dell’anca e la dorsiflessione della caviglia sono necessarie per mantenere la GRF all’interno della base d’appoggio

Figura 21 – L’inclinazione posteriore del tronco facilita l’avanzamento della coscia in fase di volo
Durante il passo il bacino si muove in tre direzioni rispetto all’anca dell’arto in carico (che ha funzione di perno): inclinazione, basculamento e rotazione. Gli abduttori e gli estensori dell’anca controllano il bacino, mentre gli addominali e i muscoli del rachide sono responsabili dell’allineamento del tronco sulla pelvi.
In appoggio bipodale la stabilità del bacino è determinata dall’azione simultanea e bilaterale di adduttori e abduttori (se predominano gli adduttori da un lato e gli abduttori dall’altro si assiste ad un sollevamento del bacino dal lato degli adduttori); in appoggio monopodale, dagli abduttori che contrastano il momento esterno dovuto al peso del corpo.
Bacino instabile sul piano frontale
Quando il bacino è instabile sul piano frontale, assistiamo a un suo abbassamento dal lato in sospensione e a una traslazione orizzontale verso il lato in appoggio.
Possiamo ricondurre questo segno a diversi fattori:
L’instabilità del bacino ostacola la stabilizzazione del tronco sull’arto in appoggio e la fase di volo dell’arto controlaterale e, in questo caso, diventa di fatto impossibile l’abbandono del deambulatore e il passaggio ai quadripodi. Per dare stabilità al bacino, nei quadri più severi di tetraparesi, è indispensabile per la locomozione il ricorso a ortesi bacino-coscia bilaterali a un grado di libertà di movimento.
Bacino antiverso
L’antiversione del bacino può essere legata a molteplici fattori:

Figura 22 – Antiversione del bacino dovuta a contrattura o spasticità dei flessori dell’anca
Può inoltre essere un compenso a:

Figura 23 – L’iperestensione del ginocchio, unitamente all’antiversione del bacino e all’antepulsione leggera del tronco, compensa la debolezza del quadricipite. Il vettore posto anteriormente al ginocchio determina l’estensione dell’articolazione
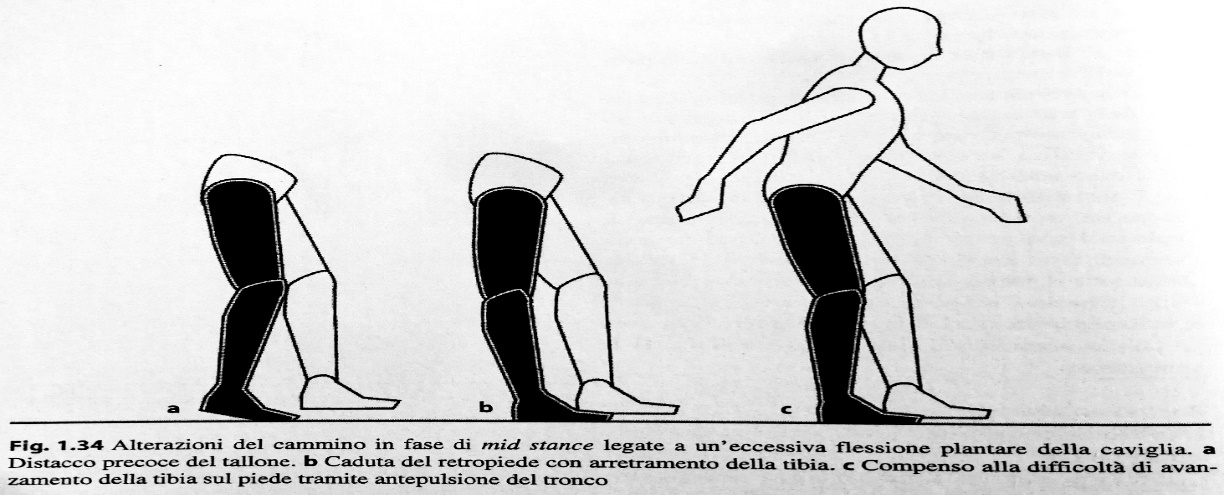
Figura 24 – Alterazioni del cammino in fase di mid stance legate a un’eccessiva flessione plantare della caviglia. a Distacco precoce del tallone. b Caduta del retropiede con arretramento della tibia. c Compenso alla difficoltà di avanzamento della tibia sul piede tramite antepulsione del tronco
Di fronte a un bacino marcatamente antiverso, il soggetto accentua come primo compenso l’iperlordosi lombare, in modo da riportare il tronco in una posizione più verticale e dunque meno faticosa (l’antepulsione del tronco aumenta notevolmente il momento flessorio esterno dell’anca e richiede maggior forza alla muscolatura glutea). Se l’antiversione è però legata a un disordine di carattere percettivo, la verticalizzazione del tronco sarà minore per la tendenza a sfuggire dallo spazio posteriore e il compenso in lordosi meno marcato. Anche nel caso di insufficienza del quadricipite, l’antepulsione del tronco verrà mantenuta quel tanto che è necessario per conservare la GRF anteriormente all’articolazione del ginocchio. Se l’antiversione è particolarmente marcata, per ridurre la fatica e aumentare la stabilità, il soggetto deve ricorrere a soluzioni alternative come l’utilizzo di appoggi per gli arti superiori (deambulatore, quadripodi).
Bacino retroverso
La retroversione del bacino può essere legata fondamentalmente a due fattori principali:

Figura 25 – La rotazione del bacino viene utilizzata per facilitare l’avanzamento dell’arto in volo in caso di debolezza dei flessori dell’anca
Sollevamento omolaterale del bacino in swing (pelvic hike)
Rappresenta un compenso per facilitare la fase di swing di un arto “troppo lungo”, per esempio in caso di piede plantiflesso associato a un’inadeguata flessione primitiva dell’anca e secondaria del ginocchio (normalmente infatti l’accorciamento dell’arto in sospensione è affidato alla flessione dell’anca che fa da starter alla flessione del ginocchio). Il soggetto compensa all’arto “troppo lungo” utilizzando il quadrato dei lombi per elevare il bacino (hiking) e fare avanzare l’arto. Il rachide compensa l’obliquità del bacino con una scoliosi funzionale per ristabilire l’allineamento verticale.
Caduta controlaterale del bacino in stance
Talvolta possiamo osservare la caduta controlaterale del bacino durante la fase di stance, che inizia non appena il peso del corpo viene trasferito sull’arto (load response) e continua fino alla pre swing. Questo fenomeno può essere dovuto a:
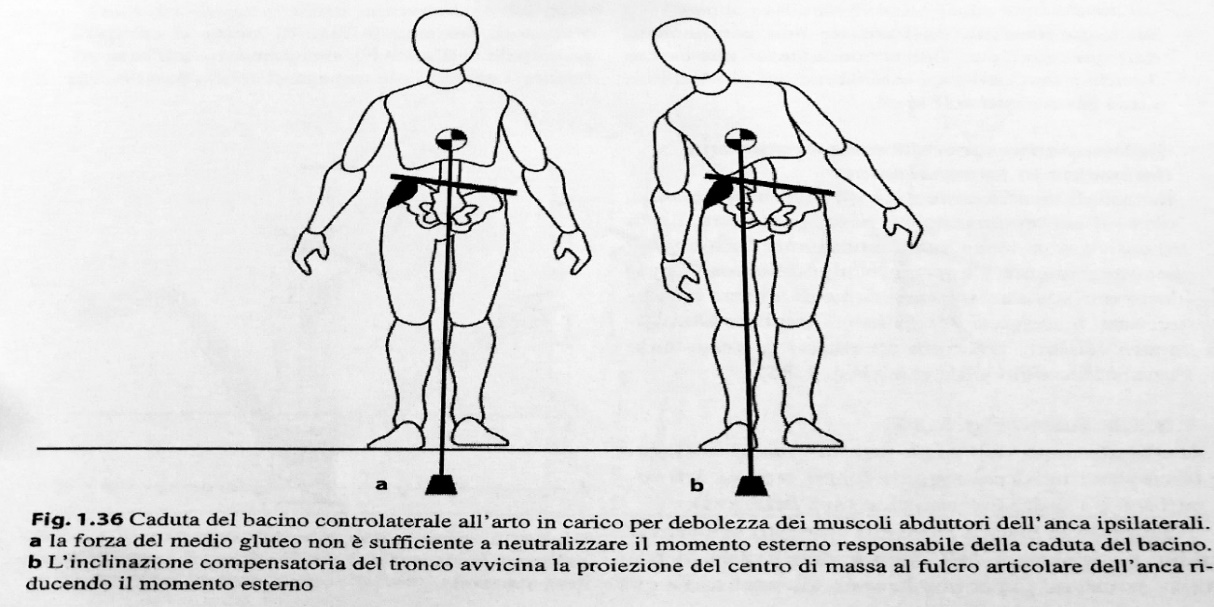
Figura 26 – Caduta del bacino controlaterale all’arto in carico per debolezza dei muscoli abduttori dell’anca ipsilaterali. a La forza del medio gluteo non è sufficiente a neutralizzare il momento esterno responsabile della caduta del bacino. b L’inclinazione compensatoria del tronco avvicina la proiezione del centro di massa al fulcro articolare dell’anca riducendo il momento esterno

Figura 27 – Caduta controlaterale del bacino conseguente a una contrattura dei muscoli adduttori ipsilaterali dell’arto in carico
Nel caso di deficit marcato del medio gluteo, è possibile osservare il compenso dell’inclinazione omolaterale del tronco (andatura con pendolo frontale di tronco) per neutralizzare il momento esterno responsabile della caduta del bacino: in questo modo il soggetto porta la GRF vicino al fulcro articolare (anca in carico), riducendone il braccio di leva. Ricordiamo che se al pendolo verso l’arto in carico si associa la caduta controlaterale del bacino, ci troviamo di fronte al segno di Trendelenburg. Se al contrario il pendolo si associa al sollevamento controlaterale del bacino, siamo di fronte al segno di Duchenne.
Caduta omolaterale del bacino in stance
Possiamo osservare la caduta omolaterale del bacino dalla parte dell’arto in carico in presenza di un accorciamento ipsilaterale non compensato dell’arto inferiore. Tale accorciamento può essere dovuto a una mancata estensione del ginocchio o a una lussazione dell’anca.
Sollevamento controlaterale e rotazione del bacino in terminal stance
In caso di insufficiente push off in terminal stance, oltre all’accorciamento del passo posteriore, l’arto in carico non viene sufficientemente “allungato” per raggiungere l’appoggio bipodale senza produrre una sostanziale variazione di altezza del baricentro. Il soggetto compensa il mancato allungamento dell’arto inferiore innalzando e avanzando l’emibacino controlaterale (Fig. 28).

Figura 28 – Sollevamento controlaterale e rotazione del bacino per facilitare l’avanzamento in presenza di insufficiente push off
L’articolazione dell’anca rappresenta il collegamento tra l’unità passeggero (capo, tronco, arti superiori) e l’unità locomotrice (arti inferiori).
Durante la fase di stance il compito principale della muscolatura dell’anca è stabilizzare il bacino: i muscoli più coinvolti sono gli estensori e gli abduttori. Dutante la fase di swing il compito principale dell’anca è l’avanzamento dell’arto inferiore: i muscoli più impegnati sono i flessori. Gli adduttori intervengono nella fase di passaggio tra la stance e la swing.
Le alterazioni che più frequentemente troviamo nelle PCI sono rappresentate da:
Anca flessa
L’anca flessa primitiva (Fig. 29) può essere dovuta a fattori diversi, quali:

Figura 29 – Inadeguata estensione dell’anca in mid stance. a In assenza di compensi, il bacino e il tronco vengono proiettati in avanti. b La lordosi lombare consente di riportare il tronco eretto. c La flessione delle ginocchia compensa la flessione dell’anca riportando sia il bacino sia il tronco verticali
La presenza di un’anca flessa minaccia la stabilità del carico in stance, ostacola la progressione del corpo e riduce la lunghezza del passo controlaterale. Limita, infatti, il passo posteriore dopo che l’arto in swing ha superato lo zenith (mentre l’anca in volo si flette, quella in carico deve estendersi). Tale condizione impone soluzioni compensatorie per consentire l’avanzamento dell’arto controlaterale, come il pivot sull’avampiede o l’intrarotazione della coscia. In terminal stance il deficit si amplifica perché vi è una richiesta aggiuntiva di estensione. L’estensione limitata dell’anca impone ulteriori soluzioni compensatorie nei segmenti corporei adiacenti, come l’aumento della lordosi lombare per contenere l’inclinazione anteriore del tronco o la flessione del ginocchio.
Di per sé, il meccanismo meno faticoso per portare verso dietro il vettore del peso corporeo è l’accentuazione della lordosi lombare, anche se questa, quando eccessiva, tende a divenire dolorosa. Al contrario, il compenso meno vantaggioso in termini di risparmio energetico è rappresentato dalla flessione del ginocchio, che porta la coscia verso dietro e permette al bacino di mantenere il suo allineamento, ma richiede maggiore attività al quadricipite perché fa aumentare il momento flessorio.
Quando parliamo di anca flessa secondaria, intendiamo una soluzione adottata dal SNC per compensare un difetto a carico di un altro distretto corporeo:

Figura 30 – Flessione dell’anca come compenso all’equino in volo

Figura 31 – Flessione dell’anca, recurvato di ginocchio e antepulsione del tronco come compensi all’equino nascosto
L’anca flessa secondaria assume pertanto un’accezione più positiva rispetto all’anca flessa primitiva e la sua correzione può avvenire solo modificando il difetto originario.
Anca estesa
Per anca estesa, intendiamo un’inadeguata flessione durante la fase di swing. Essa può essere legata a:
La presenza di un’anca estesa ha come effetto secondario una limitata flessione del ginocchio poiché manca l’avanzamento della coscia e può pertanto contribuire allo strisciamento della punta del piede a terra per eccessiva lunghezza dell’arto in volo (cleareance insufficiente). Questo segno determina un accorciamento del passo anteriore e una riduzione della velocità del cammino oltre che un aumento del consumo energetico.
I compensi che possiamo osservare per limitare gli svantaggi legati alla presenza di un’anca estesa sono:

Figura 32 – Retroversione del bacino per favorire l’avanzamento dell’arto in volo
Questi compensi sono osservabili solitamente nella fase di initial swing e possono coesistere.
Anca addotta
L’anca addotta può essere dovuta a cause primitive o essere secondaria a difetti di carico di altri distretti. Tra le cause primitive troviamo:

Figura 33 – Contrattura degli adduttori e dell’ileopsoas ipsilaterali in stance

Figura 34 – Abnorme reazione allo stiramento degli adduttori
L’anca addotta può inoltre essere conseguente all’insufficienza del medio gluteo omolaterale (adduzione che inizia con il trasferimento del carico sull’arto considerato e termina quando questo viene trasferito nuovamente sull’arto opposto), a sua volta frequentemente secondaria a marcato valgismo del collo femorale o a lussazione posterosuperiore della testa femorale (Fig. 35).

Figura 35 – Anca addotta in stance conseguente all’insufficienza del medio gluteo omolaterale
L’associazione di un’importante contrattura/retrazione degli adduttori e dell’insufficienza del medio gluteo omolaterale crea un quadro clinico molto rischioso in quanto può favorire la lussazione della testa femorale. L’anca addotta, inoltre, libera lo schema a forbice che riduce la base di appoggio e la stabilità del soggetto e ostacola la progressione in fase di swing; il piede in volo, infatti, può inciampare sul piede in appoggio, specialmente in caso di marcata rotazione interna con chiusura dell’angolo del passo. In questi casi, prima che vengano prodotti danni secondari alle coxofemorali, è importante limitare il problema ricorrendo all’utilizzo della tossina botulinica, chirurgia funzionale o ortesi di anca.
Anca intraruotata
L’anca intraruotata può essere legata a cause primitive o a fattori periferici. Tra le cause primitive troviamo:
Tra le cause periferiche e secondarie ricordiamo:
Nel ciclo di ogni passo, il ginocchio compie quattro archi di movimento con alternanza di flessioni ed estensioni: dal contatto iniziale alla risposta al carico va in leggera flessione, poi si estende gradualmente sino a raggiungere la fase terminale dell’appoggio, in cui inizia la flessione preparatoria alla fase di swing, che continua sino all’oscillazione intermedia, in cui comparirà nuovamente l’estensione.
Le principali funzioni del ginocchio durante la marcia sono: assorbire lo shock provocato dall’impatto con il suolo, stabilizzare l’arto in carico per assicurare sostegno al peso del corpo, consentire l’avanzamento rapido dell’arto in sospensione permettendone la cleareance.
Le alterazioni a carico del ginocchio che più spesso riscontriamo nella PCI sono rappresentate dalla presenza di:
Ginocchio flesso
La presenza di un ginocchio flesso può essere ricondotta a una reazione di sostegno insufficiente, a cause “posteriori” o “anteriori”.
Il pattern prodotto da una reazione di sostegno insufficiente contraddistingue i quadri dell’ipoposturalità e dipende da un ridotto “drive centrale” del controllo antigravitario.
Tra le cause “posteriori” ricordiamo:
o retrazione degli ischiocrurali: il ginocchio può estendersi solo in relazione alla retroversione del bacino. Sono presenti una costante flessione del ginocchio dell’arto in carico e una retroversione di bacino in fase di oscillazione media e terminale, compenso necessario per consentire una maggiore estensione del ginocchio e un certo guadagno del passo anteriore;
o retrazione della capsula articolare posteriore: il ginocchio non si estende mai completamente né in fase di stance né in fase di swing;
Tra le cause “anteriori” possiamo osservare:
A lungo andare il deficit della coppia plantiflessori del piede-estensori del ginocchio fa sì che il carico sull’arto inferiore avvenga a ginocchio sempre più flesso, portando al cosiddetto crouch gait pattern. La flessione del ginocchio incrementa il momento esterno flessorio poiché ne aumenta il braccio di leva, con conseguente sovraccarico del quadricipite. Tale condizione instaura un circolo vizioso che tende progressivamente a peggiorare (Fig. 36).

Figura 36 – La flessione del ginocchio incrementa il momento flessorio esterno poiché aumenta il braccio di leva
La contrazione del quadricipite crea infatti un aumento della tensione a carico del tendine sottorotuleo che progressivamente cede con conseguente risalita della rotula. Il quadricipite viene così a trovarsi in condizione di maggiore “accorciamento” che, a fronte della maggiore potenza richiesta, riduce la sua capacità di resistere ad uno sforzo prolungato. Più il quadricipite si contrae per opporsi alla flessione del ginocchio, più cede il tendine sottorotuleo, risale la rotula e cresce il momento flessorio, con aumento della richiesta al quadricipite che, per effetto dell’avvicinamento dei suoi capi di inserzione, è sempre meno in grado di rispondere. Paradossalmente più forza esprime il quadricipite, più flesso diventa il ginocchio, più rapidamente il paziente si stanca. La risalita della rotula favorisce l’iperpressione sottorotulea e la espone al rischio di lussazione.
Quando il crouch si associa ad antiversione di bacino, si può ipotizzare che la causa risieda in un problema articolare a livello del ginocchio, in una retrazione dell’ileopsoas o in un deficit del soleo. Al contrario, quando è associato a retroversione di bacino, la causa è da ricercare a livello dei flessori del ginocchio che risulteranno retratti. Infatti, un accorciamento dei flessori ha effetto su entrambi gli estremi, portando sia alla flessione del ginocchio sia alla retroversione del bacino.
In sede di valutazione è fondamentale individuare la causa del segno, distinguendo le cause “anteriori” da quelle “posteriori”. Se per esempio la flessione del ginocchio è associata a una rotula già risalita, un eventuale allungamento chirurgico dei flessori del ginocchio non potrà ripristinare l’estensione di questa articolazione, a causa dell’impossibilità del quadricipite di esprimere la forza necessaria a causa dell’alterata lunghezza del tendine sottorotuleo.
Ginocchio esteso
Come per il ginocchio flesso, anche la presenza di un ginocchio esteso può essere di tipo primitivo o secondario.
Il ginocchio esteso primitivo, o stiff knee (ginocchio rigido, con limitazione del ROM in flesso-estensione), può essere dovuto a:
La presenza di un ginocchio esteso primitivo altera in modo sostanziale tutte le fasi del ciclo del passo: nella fase di risposta al carico ostacola l’avanzamento della tibia e riduce l’assorbimento dell’impatto con il suolo; in pre swing e in initial swing determina la perdita della fase di spinta e crea difficoltà al toe off; in mid swing ostacola la cleareance dell’arto. Nei casi in cui perdura anche in swing, impone soluzioni compensatorie durante il passaggio della verticale, quali l’equino funzionale dell’arto controlaterale in carico, l’inclinazione del tronco controlaterale associata ad abduzione di anca (circonduzione) oppure l’elevazione del bacino omolaterale attraverso l’utilizzo del quadrato dei lombi (hiking).
Il ginocchio esteso secondario invece può essere legato a due principali fattori:
Conflitto torsionale
Il conflitto torsionale del ginocchio si verifica quando i segmenti scheletrici adiacenti (femore e tibia) presentano torsioni opposte sul proprio asse. Il conflitto torsionale più frequente è rappresentato da intratorsione femorale ed extratorsione tibiale. Si associa generalmente a ginocchio flesso e sollecitato in valgo. Molto più raro è invece il conflitto determinato da extratorsione femorale e intratorsione tibiale, che sollecita il ginocchio in varo.
Deviazione in varo-valgo
La deviazione in varismo e in valgismo del ginocchio può essere sia primitiva sia secondaria.
Parliamo di deviazione primitiva in caso di disallineamento scheletrico costituzionale e di deviazione secondaria in seguito alle seguenti condizioni:
Il piede rappresenta la stazione articolare di “collegamento” tra il corpo e il suolo. Esso costituisce un elemento cardine per le funzioni di atterraggio, assorbimento del carico, stabilità, progressione e spinta (Fig. 37).

Figura 37 – Funzione del piede durante le diverse fasi del ciclo del passo
Alterazioni importanti a carico di questo distretto si riscontrano molto spesso all’interno della PCI, con conseguente modificazione dell’intero ciclo del passo e frequente deterioramento progressivo delle strutture anatomiche del piede, anche se attentamente sorvegliate e correttamente sostenute.
I segni clinici che osserviamo sono:
Equino
È un segno clinico particolarmente frequente che presenta una grande variabilità di espressione in forme cliniche diverse di PCI e che può assumere significati differenti (difetto/compenso). Frequentemente evolve nel corso dello sviluppo anche dello stesso soggetto.
Può anche essere una strategia adottata per rendere più funzionale e fruibile il cammino. Elenchiamo di seguito alcune delle espressioni più frequenti (Fig. 38).

Figura 38 – a Equino di contatto che si risolve quando aumenta il carico sul piede. b Equino persistente anche durante la successiva fase di stance (equino di pieno appoggio), con conseguente flessione di ginocchio e di anca per consentire alla tibia di avanzare. c L’equino di contatto è seguito da un appoggio plantigrado solo se il ginocchio si iperestende consentendo alla tibia di arretrare (è presente una contrattura che non si riduce completamente in carico)
Equino di contatto
Se è presente un equino nella fase di contatto iniziale che si risolve subito dopo, si assiste a un’inversione dello schema di appoggio (dalla punta al tallone).
Tale condizione impedisce il rotolamento sul calcagno e talvolta anche quello sulla caviglia (1° e 2° rocker). Quando aumenta il carico sul piede, l’equino può ridursi rapidamente se la tibiotarsica è libera, più lentamente se la contrattura/retrazione del tricipite cede solo sotto il peso del corpo. In quest’ultimo caso, può determinare aggiustamenti conseguenti in iperestensione del ginocchio se la tibia arretra sotto il peso del corpo; oppure, in flessione di ginocchio e di anca, se la tibia avanza. Qualora tali compensi permangano durante la fase di stance e non si riducano progressivamente, possiamo supporre che l’equino di contatto si associ a un equino di stance.
Le possibili cause di un equino di contatto possono essere:
La presenza di questo tipo di equino determina spesso meccanismi compensatori in altre sedi che possono variare in base alla natura del problema, per esempio il soggetto può accentuare la flessione di anca e ginocchio nella fase di contatto iniziale in caso di contrattura/retrazione del tricipite, oppure può sfruttare l’inerzia “scalciando” l’arto in volo per produrre una dorsiflessione indiretta in caso di deficit selettivo dei dorsiflessori, se è presente un buon controllo motorio (pass-retract).
È bene porre attenzione quando osserviamo un contatto di punta del piede al suolo (forefoot contact). Esso non si accompagna sempre a un equino di contatto, ma può essere dovuto a un’inadeguata estensione del ginocchio in terminal swing senza plantiflessione della tibiotarsica (equino apparente). Allo stesso modo, la presenza di un equino può manifestarsi anche attraverso un contatto di pianta (foot flat o low heel contact) secondo l’entità della contrattura/retrazione, dei compensi che il soggetto è in grado di attuare ecc. Infatti, il vero piede equino è connotato sia dalla tibiotarsica in posizione di plantiflessione (maggiore di 90°) sia dall’appoggio di punta. Se vi è un appoggio di punta in assenza di plantiflessione della caviglia, siamo di fronte a un equino apparente, dovuto all’eccessiva flessione del ginocchio. Se, al contrario, l’appoggio avviene di pianta, ma la plantiflessione di caviglia supera i 90°, parliamo di equino nascosto, condizione permessa da un recurvato di ginocchio. Se il ginocchio è allineato e l’appoggio avviene sul solo avampiede in valgo-pronazione o più raramente in varo-supinazione, parliamo di equino mascherato (la deviazione laterale o mediale del calcagno compensa momentaneamente la retrazione del tricipite).
Equino di pieno appoggio (mid stance)
L’equino di pieno appoggio si manifesta nella fase di mid stance e blocca il rotolamento della gamba sul piede alla caviglia (2° rocker), che viene sostituito dal rotolamento sulla punta (a carico delle articolazioni metatarso falangee, 3° rocker), come avviene nel caso si indossino tutori AFO rigidi alla tibiotarsica. Per questo l’avampiede viene sollecitato in valgo-pronazione o in varo-supinazione secondo l’orientamento del ginocchio. Questo tipo di equino limita la stabilità in appoggio, anticipa la fase di spinta e riduce di conseguenza la lunghezza del passo controlaterale.
Generalmente aumenta nel cammino a piedi nudi e richiede un assetto compensatorio al ginocchio (iperestensione o flessione), all’anca (flessione o estensione) e al tronco (antepulsione) (Fig. 39).
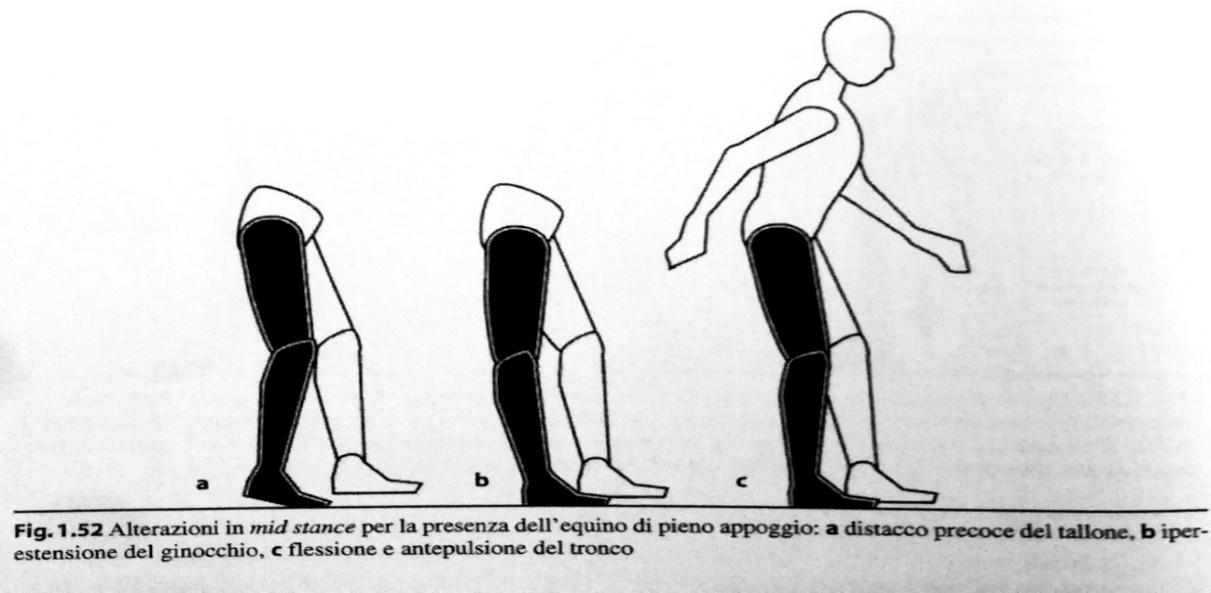
Figura 39 – Alterazioni in mid stance per la presenza dell’equino di pieno appoggio: a Distacco precoce del tallone, b Iperestensione del ginocchio, c Flessione e antepulsione del tronco
È bene porre particolare attenzione all’assetto del piede durante la stance, poiché un contatto di pianta potrebbe nascondere un equino mascherato, nel caso sia presente un cedimento in eversione del mesopiede con chiusura apparente della tibiotarsica, risalita e disallineamento in valgo del tallone. Tale condizione determina una perdita del braccio di leva dei plantiflessori, con conseguente perdita della coppia estensoria del ginocchio. L’equino mascherato può essere riducibile o rigido e va attentamente monitorato e compensato poiché col tempo tende a divenire doloroso e può condurre a un piede reflesso.
Le possibili cause dell’equino di pieno appoggio sono da ricercare:
L’equino di pieno appoggio può rappresentare anche un compenso a un’eterometria reale o funzionale degli arti inferiori e in questo caso raggiunge il culmine durante il passaggio dalla verticale dell’arto opposto (zenith cross). Si associa a un’eccessiva lunghezza dell’arto inferiore controlaterale, per esempio per stiff knee o per equino in swing, o a un eccessivo accorciamento dell’arto omolaterale, per esempio per crouch (mancata estensione del ginocchio in mid stance). Parliamo in questo caso di equino funzionale.
Equino di spinta
In presenza di un equino di spinta, si osserva un distacco prematuro del tallone che rende più breve la fase di appoggio anticipando la terminal stance. È causato dall’avanzamento della tibia sul piede che, allungando il tricipite surale e gli altri plantiflessori, ne provoca la contrazione prematura per un’abnorme reazione allo stiramento. Viene spesso sfruttato in modo funzionale per la progressione e la velocizzazione del cammino, pertanto non è sempre necessario inibirlo, ma al contrario è possibile accettarlo attraverso l’utilizzo di calzature ortopediche predisposte e di plantari flessibili anziché di tutori più o meno rigidi come i Tone Reducing Ankle Foot Orthosis (TRAFO).
Equino in swing
È un equino che compare durante la fase di sospensione dell’arto e può portare allo strisciamento della punta (cleareance insufficiente).
Si individuano due tipologie fondamentali di equino in swing:
L’equino in fase di sospensione porta a un accorciamento del passo anteriore e alla necessità di utilizzare meccanismi compensatori per l’avanzamento quali:
Equino strutturale
È un equino che permane durante tutte le fasi del ciclo del passo e può eventualmente ridursi, senza però scomparire, durante la fase di pieno appoggio per l’azione di stiramento muscolare esercitata dal carico. È causato dalla retrazione della struttura mesenchimale di supporto del tricipite, pertanto non scompare nemmeno in narcosi. Può combinarsi a valgo-pronazione o a varo-supinazione del piede, che talora possono mascherarlo. Esige meccanismi compensatori (ginocchio, anca, tronco). Tende a ridursi momentaneamente dopo che si è utilizzato il tavolo stabilizzatore per l’azione di stiramento esercitata dal peso del corpo, ma si tratta solitamente di un effetto temporaneo.
Talismo
Un’eccessiva flessione dorsale, denominata talismo, può essere causata da:
La presenza di un piede talo ritarda il sollevamento del calcagno in terminal stance annullando la fase di spinta (push off). I passi risultano perciò più corti e la velocità del cammino ridotta. Il talismo contribuisce a un cammino a ginocchio flesso (crouch gait) per compromissione della coppia estensoria attiva sul ginocchio (Fig. 40).

Figura 40 Il talismo altera la fase di push off e contribuisce a un cammino a ginocchio flesso
Aumenta l’instabilità in stance e produce un maggiore affaticamento complessivo.
I soggetti con piede talo, se non supportati da adeguate ortesi, tendono a utilizzare come compenso una riduzione del rotolamento sul calcagno per evitare la flessione del ginocchio durante la fase di load response.
Deviazioni sul piano frontale
Le deviazioni sul piano frontale sono rappresentate da:
La presenza di deviazioni sul piano frontale determina un’aumentata apertura/chiusura dell’angolo del passo con possibile conflitto torsionale al ginocchio, un aumento della frequenza delle cadute e una tendenza a strutturare deformità articolari secondarie dolorose (13).
| Indice |
| ABSTRACT - INTRODUZIONE |
| BIBLIOGRAFIA |
| Tesi di Laurea di: Michele GHIGO |